Carnegie Mellon University’s Robotics Institute (RI) has designed a system that enables a quadruped robot to nimbly walk a narrow balance beam.
“This experiment was huge,” said Zachary Manchester, head of the Robotic Exploration Lab. “I don’t think anyone has ever successfully done balance beam walking with a robot before.”
The team uses reaction wheel actuators (RWA) that are primarily used in the aerospace industry to perform attitude control on satellites by manipulating the angular momentum of the spacecraft. They developed a proof-of-concept RWA module that can be attached to the back of a commercially available Unitree A1 robot – one on the pitch axis and one on the roll axis – to provide additional angular momentum control. The 4.3-kg RWA used module is compact, reusable, and has high control bandwidth.
With the aid of a novel control technique, the RWA allows the robot to balance independently of the positions of its feet. With the RWA, it doesn’t matter if the robot’s legs are in contact with the ground or not as the RWAs provide independent control of the body’s orientation.
“You basically have a big flywheel with a motor attached,” said Manchester. “If you spin the heavy flywheel one way, it makes the satellite spin the other way. Now take that and put it on the body of a quadruped robot.”
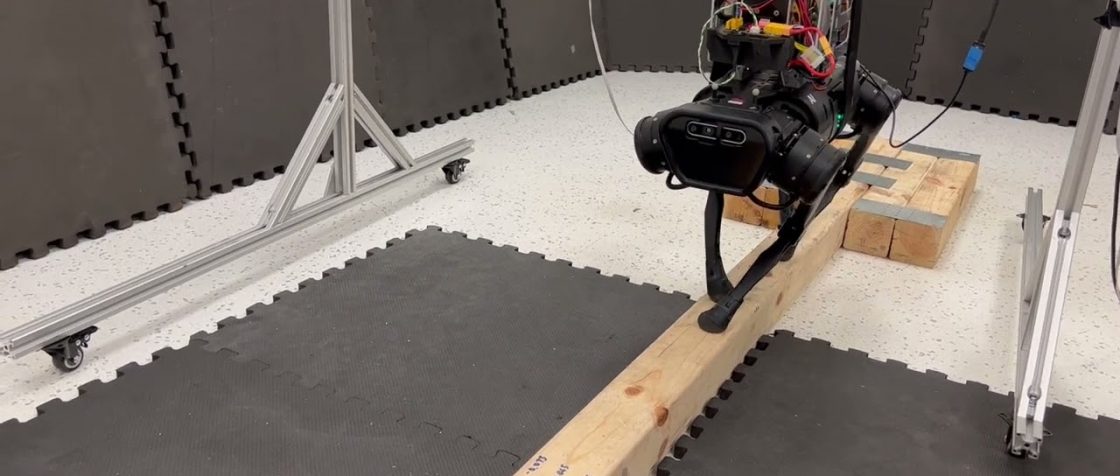
The system was tested with a series of successful experiments that demonstrated the robot’s enhanced ability to recover from sudden impacts. In one simulation, they mimicked the “falling-cat problem” by dropping the robot upside down from a height of nearly half a meter. The RWAs enabled the robot to flip itself around in mid-air and land on its feet. They also were able to demonstrate the robot’s ability to recover from disturbances -and its balancing capability – by having the robot walk about 3 meters along a 6-centimeter-wide wooden balance beam.