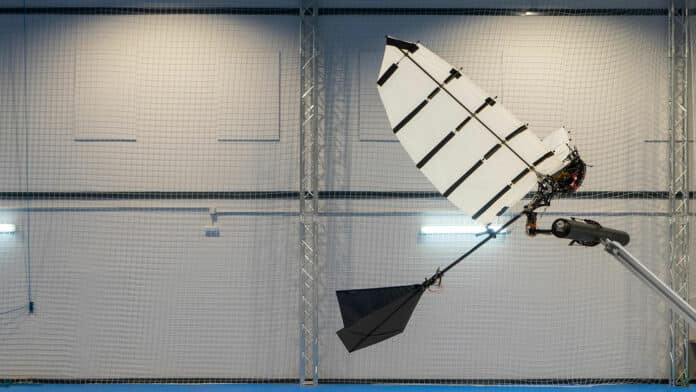
The Swiss Federal Institute of Technology Lausanne (EPFL) has developed a method that allows a flapping-wing robot to land autonomously on a horizontal perch using a claw-like mechanism. Until now, flapping-wing vehicles – called ornithopters – have been unable to stop their own flight.
As part of the European Union GRIFFIN project, the team at EPFL and researchers from the University of Seville developed a prototype ornithopter with a wingspan of 1.5 meters (59 inches), weighing only 700 grams (~ 25 ounces). The robot included a single carbon-fiber-bodied, spring-loaded mechanical claw; a fully on-board computer; and a navigation system, complete with an external motion-capture system to help it determine its position.
The claw mechanism was finely calibrated to compensate for the oscillations of flight in order for it to be able to hone in on and grasp a perch. It was designed to absorb the robot’s forward momentum upon impact and to close quickly and firmly. Once perched, the robot can remain there without any energy expenditure. The bistable claw appendage can grasp a branch within 25 milliseconds and then re-open.
“At the moment, the flight experiments are carried out indoors because we need to have a controlled flight zone with precise localization from the motion capture system,” said Raphael Zufferey, a postdoctoral fellow at EPFL. “In the future, we would like to increase the robot’s autonomy to perform perching and manipulation tasks outdoors in a more unpredictable environment.”
This perching robot could eventually be used for long-range missions, bird observation, manipulation, and outdoor flight.
GRIFFIN’s goal is to design a unified framework for the development of flying, flapping-wing robots with dexterous manipulation capabilities. These robots will be expected to be able to fly minimizing energy consumption, to perch on curved surfaces, and to perform dexterous manipulation.