Researchers from the John A. Paulson School of Engineering and Applied Sciences (SEAS) at Harvard used nature as an inspiration to create a new type of soft, robotic gripper. The robotic gripper has a network of thin tentacles to ensnare and grab objects, much like jellyfish collecting prey.
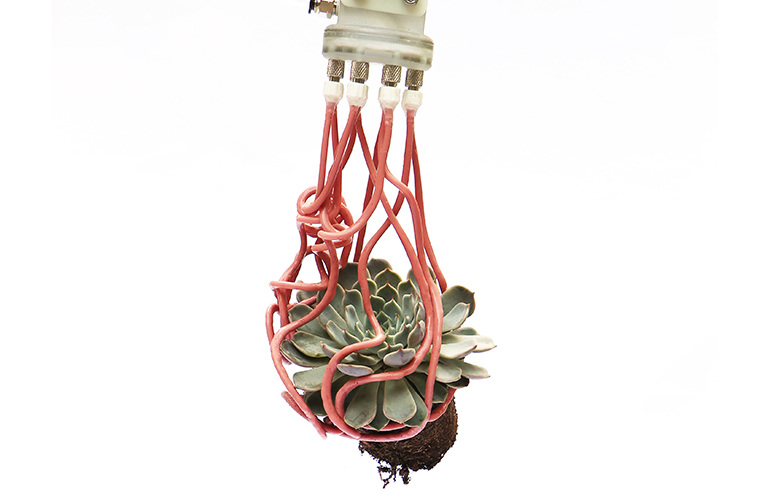
The individual pseudo-tentacles are not very strong on their own – but, when . used as a group, the filaments can firmly grip and hold things of all shapes and sizes. The gripper does not rely on sensing, planning, or feedback control, it only needs simple inflation to wrap around items. The foot-long filaments are hollow, rubber tubes. One side of the tube has thicker rubber than the other, so when the tube is pressurized, it curls up. The curls knot and entangle with each other and the object, with each entanglement increasing the strength of the hold. Though the collective hold is strong, each contact is individually weak and thus won’t damage fragile objects. To release the object, the filaments are just depressurized.
The researchers tested the gripper with simulations and experiments that picked up a range of objects, such as houseplants and toys. It’s hoped that the gripper could be used in real-world applications to grasp soft fruits and vegetables for agricultural production and distribution, delicate tissue in medical settings, and irregularly shaped objects.
“With this research, we wanted to reimagine how we interact with objects,” said Kaitlyn Becker, first author of the paper. “By taking advantage of the natural compliance of soft robotics and enhancing it with a compliant structure, we designed a gripper that is greater than the sum of its parts and a grasping strategy that can adapt to a range of complex objects with minimal planning and perception.”
The study was published in the journal Proceedings of the National Academy of Sciences (PNAS). It was funded by the Office of Naval Research, the National Science Foundation, the Simons Foundation, and the Henri Seydoux Fund.